Es ist bekannt, einen Dualantrieb für Fahrräder mit aufrechter Sitzposition einzusetzen. Der hauptsächlich zu therapeutischem Zweck dienende zusätzliche Armantrieb kann dabei auf das Vorderrad oder das Hinterrad wirken. Erfolgt die Umsetzung der Armbewegung auf das Vorderrad – DE 43 23 850 – ist es allerdings nicht möglich, eine gemeinsame Schaltungseinheit für beide Bewegungsabläufe zu nutzen. Der praktische Einsatz als Fortbewegungsmittel ist damit beschränkt.
Erfolgt der Armantrieb mit Wirkung auf das Hinterrad – DE 36 29 851 – , bestehen technische Schwierigkeiten, die Armantriebskräfte vorteilhaft in den Antriebsstrang einzuleiten und dabei gleichzeitig eine Schwenkbewegung beim Lenken der Vorderradgabel zu gewährleisten. Im Patent – US 632.797 – ist die Lenkbewegung durch das Verwinden der Armantriebskette realisiert, was einen begrenzten Lenkeinschlag zur Folge hat. Grundsätzlich ist jedoch ein ergonomischer Bewegungsablauf bei gleichzeitigem Arm- und Beinantrieb in aufrechter Sitzposition stark eingeschränkt, da beim Fahrradfahren die Armgliedmaßen eine nicht unerhebliche Halte- und Ausgleichsfunktion zur Trittbewegung darstellen (vergl.: Bewegungsablauf eines Radrennfahrers im Wiegetritt). Zudem ist dieses System des Dualantriebs auf ein funktionales Freilaufsystem angewiesen, um eine effektive Totpunktüberwindung in der Beinbewegung sowie eine individuelle Synchronisation beider Bewegungsabläufe zu ermöglichen.
Ein Freilaufsystem, welches den Arm- und Beinantrieb entkoppelt, zeigt die Konstruktion – US 5.280.936 – , wobei die armbetriebene Funktionseinheit nur eine Wirkungsrichtung (ähnlich dem Prinzip einer Werkzeugratsche) zulässt. Dies bedeutet eine geringe Effektivität bei der Umsetzung des Armantriebs in Bewegungsenergie. Der für die Fortbewegung unterstützenden Zugbewegung muss dabei ein Vorschub ohne Energieumsetzung geleistet werden. Die Ausgestaltung des Armantriebs in Form einer Lenkstange löst zudem nicht das Problem, dass bei gleichzeitiger Lenk- und Zugbewegung die Beine mit dem Lenker kollidieren.
Patent – FR 694.365 – verfügt über ein baulich getrenntes Lenksystem im linken bzw. rechten Handgriff der Armantriebseinheit. Die horizontal verlaufende Lenkachse ist vom vertikal angeordneten Handgriff getrennt, d. h. der Handgriff wird für die Lenkbewegung in die entsprechende Richtung gekippt. Um der Problematik der Balance entgegenzuwirken, ist die Lenkung für den Einsatz in einem Dreirad vorgesehen und damit mit den Nachteilen mehrspuriger Fahrräder behaftet. Die Energie des mit den Armen bewegten Antriebsgestänges wird erst über ein Zwischengetriebe am Tretlager in eine Rotationsbewegung umgesetzt. Die Aktionen ermöglichen zwar einen ungestörten Ablauf von Lenk-, Arm- und Beinbewegung, jedoch sind der Wirkungsgrad und der ergonomische Nutzen gegenüber kurbelbetriebenen Antriebssystemen geringer.
Die Konstruktion einer armbetriebenen Antriebseinheit in Form einer rotierenden Kurbelbewegung ist in der technischen Ausführung – US 6.193.253 – beschrieben. Die asymmetrische Anordnung der Handgriffe wirkt sich allerdings im Fahrbetrieb äußerst störend auf den Halte- und Druckpunkt im Wirbelbereich aus, sobald der Fahrersitz in eine stärker geneigte Position gestellt wird und der Rücken an der Sitzschale anliegt. Ausschlaggebend ist die durch die Kurbelaktion bedingte Bewegung im Brustwirbelbereich. Der Armantrieb ist auch hier explizit für ein Dreirad entwickelt, denn die Lenkungskonstruktion ist nicht für den komplexen Bewegungsablauf einspuriger Fahrräder konzipiert.
Schien der Dualantrieb bisher kaum für den Einsatz als alternatives Fortbewegungsmittel vorstellbar, so ermöglicht die differenzierte Rahmenkonstruktion beim Liegerad eine exklusive technische Lösung. Der Erfindung liegt das Problem zugrunde, die Ergonomie des Dualantriebs im Liegeradbetrieb zu optimieren, sowie den Einsatz der Arm- und Beinbewegung einfach und effektiv zu gestalten, um ein sportliches Fortbewegungsmittel zu realisieren. Besonderes Augenmerk richtet sich dabei auf die Problematik der Gleichgewichtslage einspuriger Fahrräder.
Dieses Problem wird durch die im Patentanspruch aufgeführten Merkmale gelöst.
Die mit der Erfindung erzielten Vorteile bestehen insbesondere darin, dass der Einsatz der Oberkörper-, Arm- und Beinmuskulatur ein nahezu ganzheitliches Körpertraining bilden. Dies gilt besonders für das Liegerad, denn ohne Dualantrieb ruht der Oberkörper (im Gegensatz zum herkömmlichen Fahrrad) während der Fahrt gänzlich.
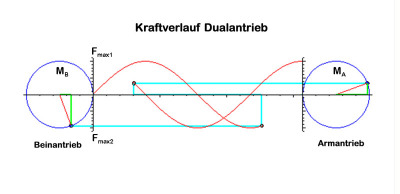
Für den praxisgerechten Einsatz des Liegezweirades ist eine Ausgestaltung des Dualantriebs mit einem Freilauf unbedingt erforderlich. Die Freilaufkopplung des Armantriebs am Tretlager des Beinantriebs dient zur Optimierung des Wirkungsgrades sowie für ein besseres Handling in schwierigen Fahrsituationen. Der Freilauf ist so gestaltet, dass der Armantrieb jederzeit eingesetzt oder unterbrochen werden kann. Dadurch findet eine angepasste Synchronisation der Bewegungsabläufe von Bein- und Armbewegung statt. Der in der Rotation um bis zu 90° versetzt geführte Armantrieb unterstützt die Überwindung der Totpunkte im Kurbelsystem des Beinantriebs, was letztlich einen komfortablen, ermüdungsfreien und gleichmäßigen Bewegungsablauf gewährleistet.
Den Kraftverlauf und das Zusammenwirken von Arm- und Beinantrieb zeigt folgende Grafik:
Die Konstruktion der Armantriebseinheit umfasst spiegelgleich angeordnete Handgriffe, die eine synchrone Lenk- und Rotationsbewegung beider Hände bzw. Arme gewährleistet. Die synchrone Stellung der Handgriffe ermöglicht für den Armantrieb einen ergonomischen, kurbelartigen Bewegungsablauf. Gleichzeitig zur Rotationsbewegung der Handgriffe sind Lenkbewegungen durchführbar, um die Gleichgewichtslage im Fahrbetrieb des Zweirades zu halten. Damit der Armantrieb nicht die gleichzeitig ausgeführte Beinbewegung behindert, sind die Handgriffe seitlich neben den Beinen angeordnet.
Die armbetriebene Funktionseinheit ermöglicht es, auch unter voller Belastung des Armantriebs Lenkbewegungen durchzuführen. Anatomische Voraussetzung bildet hierfür der menschliche Unter- und Oberarm sowie das Handgelenk. Die technische Voraussetzung ergibt sich aus der Anordnung der Lenkachse zur Kurbelachse. Die vertikale Drehachse für die Lenkbewegung ist zentral in den Handgriffen des Armantriebes angeordnet und verläuft somit 90° zur Kurbelachse. Während der gesamten Kurbelbewegung befindet sich der Handgriff in vertikaler Position und kann für Lenkbewegungen gedreht werden. Die integrierten Lenkungszüge am oberen und unteren Ende der Lenkachse stellen eine störungsfreie Rotationsbewegung des Armantriebs sicher und behindern – auch bei Lenkbewegungen – die Beinbewegung nicht. Der Drehgriff befindet sich in jedem Fall – auch während der gesamten Drehung – in vertikaler Position. Die ausgeführte Drehbewegung der Handgriffe steuert über biegeweiche Elemente, ein durch Anordnung zweier gegenläufig montierter Systeme, die Zugbewegungen am Lenkkopf des Vorderrades. Die Einstellung der Lenkzugspannung ermöglicht die Präzision, die notwendig ist, um die Lenkung im Liegeradbetrieb für die Gleichgewichtslage zu betreiben. Beide Systeme arbeiten in gegenseitiger Abhängigkeit, wodurch erreicht wird, dass beim Ausfall eines Systems zumindest die Lenkeigenschaft eines Lenkdrehgriffes erhalten bleibt.
Die Konstruktion der Armantriebseinheit umfasst spiegelgleich angeordnete Handgriffe, die eine synchrone Lenk- und Rotationsbewegung beider Hände bzw. Arme gewährleistet. Die synchrone Stellung der Handgriffe ermöglicht für den Armantrieb einen ergonomischen, kurbelartigen Bewegungsablauf. Gleichzeitig zur Rotationsbewegung der Handgriffe sind Lenkbewegungen durchführbar, um die Gleichgewichtslage im Fahrbetrieb des Zweirades zu halten. Damit der Armantrieb nicht die gleichzeitig ausgeführte Beinbewegung behindert, sind die Handgriffe seitlich neben den Beinen angeordnet.
Die armbetriebene Funktionseinheit ermöglicht es, auch unter voller Belastung des Armantriebs Lenkbewegungen durchzuführen. Anatomische Voraussetzung bildet hierfür der menschliche Unter- und Oberarm sowie das Handgelenk. Die technische Voraussetzung ergibt sich aus der Anordnung der Lenkachse zur Kurbelachse. Die vertikale Drehachse für die Lenkbewegung ist zentral in den Handgriffen des Armantriebes angeordnet und verläuft somit 90° zur Kurbelachse. Während der gesamten Kurbelbewegung befindet sich der Handgriff in vertikaler Position und kann für Lenkbewegungen gedreht werden. Die integrierten Lenkungszüge am oberen und unteren Ende der Lenkachse stellen eine störungsfreie Rotationsbewegung des Armantriebs sicher und behindern – auch bei Lenkbewegungen – die Beinbewegung nicht. Der Drehgriff befindet sich in jedem Fall – auch während der gesamten Drehung – in vertikaler Position. Die ausgeführte Drehbewegung der Handgriffe steuert über biegeweiche Elemente, ein durch Anordnung zweier gegenläufig montierter Systeme, die Zugbewegungen am Lenkkopf des Vorderrades. Die Einstellung der Lenkzugspannung ermöglicht die Präzision, die notwendig ist, um die Lenkung im Liegeradbetrieb für die Gleichgewichtslage zu betreiben. Beide Systeme arbeiten in gegenseitiger Abhängigkeit, wodurch erreicht wird, dass beim Ausfall eines Systems zumindest die Lenkeigenschaft eines Lenkdrehgriffes erhalten bleibt.